Difference between revisions of "IC Python API:Basic Animation"
Chuck (RL) (Talk | contribs) m (→Animating the Props) |
Chuck (RL) (Talk | contribs) m |
||
| Line 1: | Line 1: | ||
{{TOC}} | {{TOC}} | ||
| − | {{Parent|IC_Python_API | + | {{Parent|IC_Python_API#Sample_Code_Snippets|RL Python Sample Code Snippets}} |
This article will focus on basic animation with the standard interface of setting the data bloc for the transform controller. However, we will attempt to spice it up with an algorithm for parametric animation. | This article will focus on basic animation with the standard interface of setting the data bloc for the transform controller. However, we will attempt to spice it up with an algorithm for parametric animation. | ||
Latest revision as of 20:56, 5 September 2021
- Main article: RL Python Sample Code Snippets.
This article will focus on basic animation with the standard interface of setting the data bloc for the transform controller. However, we will attempt to spice it up with an algorithm for parametric animation.
Preparing the Scene
Prepare an iClone scene for this lesson with the following steps:
- Create a new iClone scene
- Create a ball: Create > Primitive Shape > Sphere.
- Create a cylinder: Create > Primitive Shape > Cylinder.
- Move the props apart for better visualization.
Required Modules
Only the standard RLPY module is required for this lesson.
import RLPy
Parametric Algorithm

Parametric equations are commonly used to express the coordinates of the points that make up a geometric object such as a curve or surface. In this example, we'll use the following formula to travel along the parameter of a circle:
point.x = origin.x + radius * Cosine( angle )
point.y = origin.y + radius * Sine( angle )
Keep in mind that angle is in radians.
Python Code
The following code will help use retrieve a point on a circumference of a circle based on the position and radius of the circle. The angle input is the parameter we'll feed into the equation to get a point location output.
def parametric_point(center_point, radius, angle):
# Convert angle to radians
a = RLPy.RMath.CONST_DEG_TO_RAD * angle
# Calculate the point on the circumference of a circle
x = center_point.x + radius * RLPy.RMath.Cos(a)
y = center_point.y + radius * RLPy.RMath.Sin(a)
return RLPy.RVector2(x, y)
Setting up the Props
Let's change the way the props are displayed before deploying animation keys.
# Grab the ball in the scenes: Create > Primitive Shape > Sphere
ball = RLPy.RScene.FindObject(RLPy.EObjectType_Prop, "Ball_000")
# Grab the stick in the scenes: Create > Primitive Shape > Cylinder
stick = RLPy.RScene.FindObject(RLPy.EObjectType_Prop, "Cylinder")
# Get transform control and data block for the ball
ball_control = ball.GetControl("Transform")
ball_db = ball_control.GetDataBlock()
# Get transform control and data block for the stick
stick_control = stick.GetControl("Transform")
stick_db = stick_control.GetDataBlock()
# Setup the stick that spins by laying it on its side and extending its length
time = RLPy.RTime(0)
stick_db.SetData("Position/PositionZ", time, RLPy.RVariant(35))
stick_db.SetData("Rotation/RotationY", time, RLPy.RVariant(90 * RLPy.RMath.CONST_DEG_TO_RAD))
stick_db.SetData("Scale/ScaleX", time, RLPy.RVariant(0.25))
stick_db.SetData("Scale/ScaleY", time, RLPy.RVariant(0.25))
stick_db.SetData("Scale/ScaleZ", time, RLPy.RVariant(1.75))
-
 The initial scene setup
The initial scene setup -
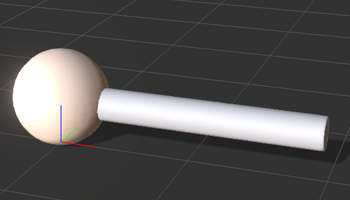 The result after running the script above.
The result after running the script above.
Animating the Props

Let's spin the stick and the ball around in 360 degrees three times.
degrees = 3 * 360 # Total degrees = revolutions * 360, here we spin 3 times
for i in range(1, degrees):
time = RLPy.RTime(i * 10)
# Rotate the stick
stick_db.SetData("Rotation/RotationX", time, RLPy.RVariant(-i * RLPy.RMath.CONST_DEG_TO_RAD))
# Move the ball to align with the stick
position = parametric_point(RLPy.RVector2(0, 0), 200, i)
ball_db.SetData("Position/PositionX", time, RLPy.RVariant(position.x))
ball_db.SetData("Position/PositionY", time, RLPy.RVariant(position.y))
# Playback for the entire duration of the animation
RLPy.RGlobal.Play(RLPy.RTime(0), RLPy.RTime(degrees * 10))
Everything Put Together
You can copy and paste the following code into a PY file and load it into iClone via Script > Load Python.
import RLPy
def parametric_point(center_point, radius, angle):
# Convert angle to radians
a = RLPy.RMath.CONST_DEG_TO_RAD * angle
# Calculate the point on the circumference of a circle
x = center_point.x + radius * RLPy.RMath.Cos(a)
y = center_point.y + radius * RLPy.RMath.Sin(a)
return RLPy.RVector2(x, y)
# Grab the ball in the scenes: Create > Primitive Shape > Sphere
ball = RLPy.RScene.FindObject(RLPy.EObjectType_Prop, "Ball_000")
# Grab the stick in the scenes: Create > Primitive Shape > Cylinder
stick = RLPy.RScene.FindObject(RLPy.EObjectType_Prop, "Cylinder")
# Get transform control and data block for the ball
ball_control = ball.GetControl("Transform")
ball_control.ClearKeys()
ball_db = ball_control.GetDataBlock()
# Get transform control and data block for the stick
stick_control = stick.GetControl("Transform")
stick_control.ClearKeys()
stick_db = stick_control.GetDataBlock()
# Setup the stick that spins by laying it on its side and extending its length
time = RLPy.RTime(0)
stick_db.SetData("Position/PositionZ", time, RLPy.RVariant(35))
stick_db.SetData("Rotation/RotationY", time, RLPy.RVariant(90 * RLPy.RMath.CONST_DEG_TO_RAD))
stick_db.SetData("Scale/ScaleX", time, RLPy.RVariant(0.25))
stick_db.SetData("Scale/ScaleY", time, RLPy.RVariant(0.25))
stick_db.SetData("Scale/ScaleZ", time, RLPy.RVariant(1.75))
degrees = 3 * 360 # Total degrees = revolutions * 360, here we spin 5 times
for i in range(1, degrees):
time = RLPy.RTime(i * 10)
# Rotate the stick
stick_db.SetData("Rotation/RotationX", time, RLPy.RVariant(-i * RLPy.RMath.CONST_DEG_TO_RAD))
# Move the ball to align with the stick
position = parametric_point(RLPy.RVector2(0, 0), 200, i)
ball_db.SetData("Position/PositionX", time, RLPy.RVariant(position.x))
ball_db.SetData("Position/PositionY", time, RLPy.RVariant(position.y))
# Playback for the entire duration of the animation
RLPy.RGlobal.Play(RLPy.RTime(0), RLPy.RTime(degrees * 10))
APIs Used
You can research the following references for the APIs deployed in this code.